
E-posformaatfout
emailCannotEmpty
emailDoesExist
pwdLetterLimtTip
inconsistentPwd
resetAccountPassword
forTheAccount
pwdLetterLimtTip
inconsistentPwd
resetSuccess
resetSuccessTips
login


Die spesifieke strctuur van die servo
2024-04-29 16:44:08
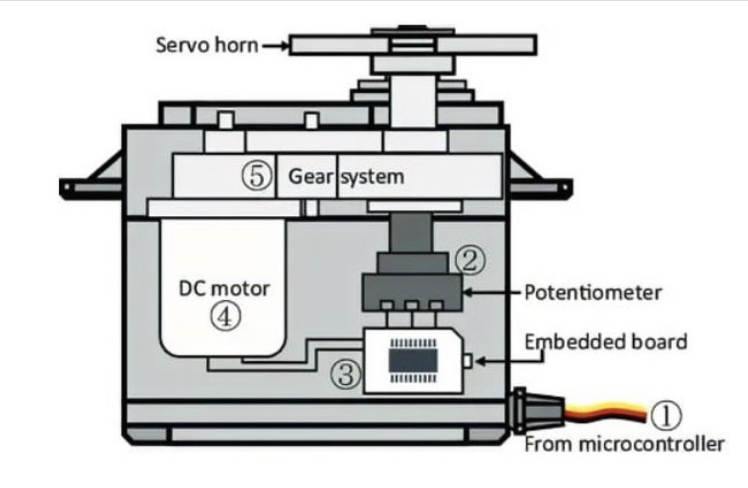
Die spesifieke struktuur van die servo is soos volg:
①: seinlyn: ontvang die beheersein van die mikrobeheerder;
②: potensiometer: dit kan die posisie van die uitsetas meet, wat aan die
terugvoerpart van die hele servo -meganisme;
③: Interne beheerder: die verwerking van die sein vanaf die eksterne beheer, die motor en die motor dryf en
die verwerking van die terugvoerposisie -sein, is die kern van die hele servo -meganisme;
④: Motor: as aktuator, hoeveel spoed, wringkrag, posisie word uitgevoer;
⑤: Transmissiemeganisme/servo -stelsel: hierdie meganisme skaal die uitsetslag van die
motor na die finale uitsethoek volgens 'n sekere transmissieverhouding;
Die uitset van die servo word beheer deur 'n PWM -sein na die seinlyn van die servo te stuur.
①: seinlyn: ontvang die beheersein van die mikrobeheerder;
②: potensiometer: dit kan die posisie van die uitsetas meet, wat aan die
terugvoerpart van die hele servo -meganisme;
③: Interne beheerder: die verwerking van die sein vanaf die eksterne beheer, die motor en die motor dryf en
die verwerking van die terugvoerposisie -sein, is die kern van die hele servo -meganisme;
④: Motor: as aktuator, hoeveel spoed, wringkrag, posisie word uitgevoer;
⑤: Transmissiemeganisme/servo -stelsel: hierdie meganisme skaal die uitsetslag van die
motor na die finale uitsethoek volgens 'n sekere transmissieverhouding;
Die uitset van die servo word beheer deur 'n PWM -sein na die seinlyn van die servo te stuur.
Kontak Ons
PRODUK TAGS
Kontak Ons
Gee asseblief jou navraag in die vorm hieronder. Ons sal jou binne 24 uur antwoord.